侧边栏
pyboard:quickref
pyboard快速参考
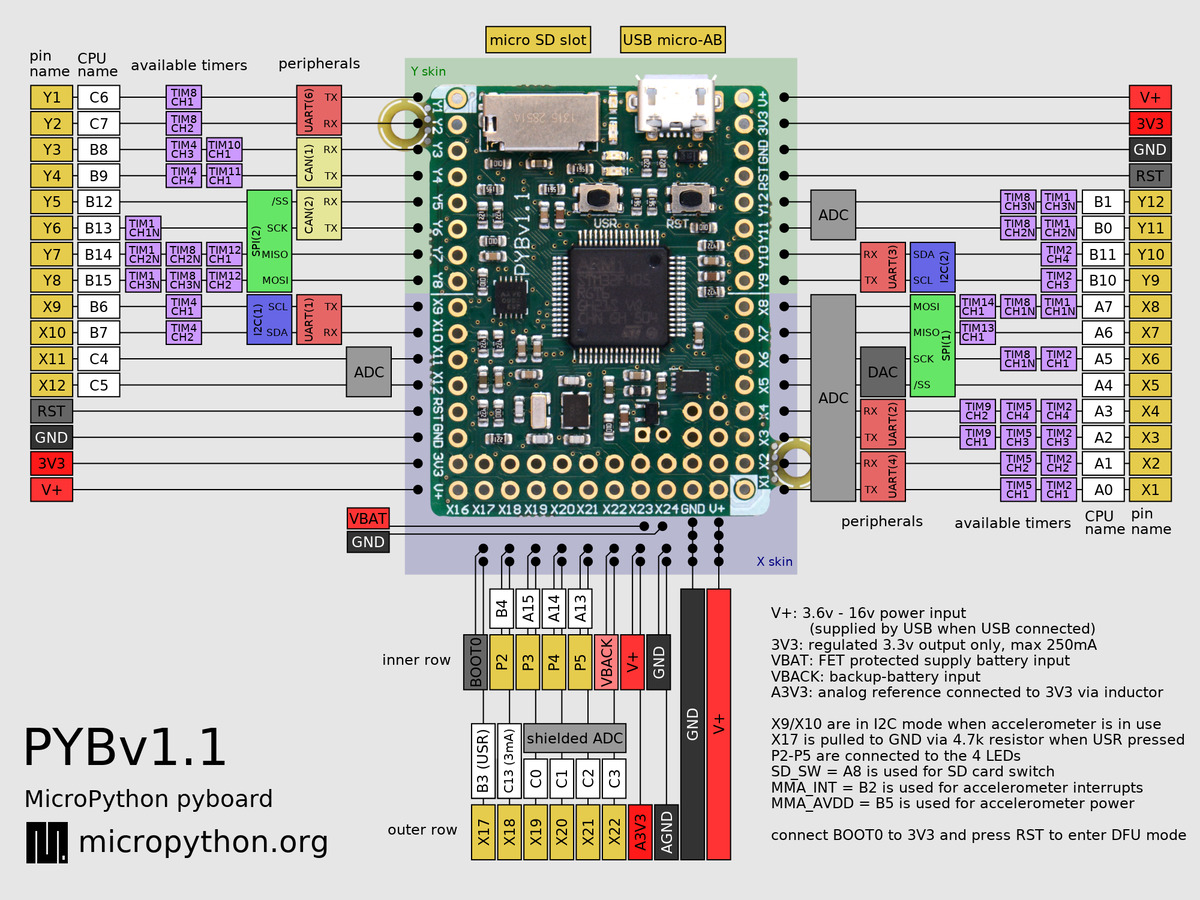
下面的引脚图是 PYBv1.0. pyboard其他版本的见: PYBv1.1 PYBLITEv1.0-AC PYBLITEv1.0.
{kind=link}
{kind=link}
{kind=link}

通用硬件控制
See pyb. :
import pyb pyb.repl_uart(pyb.UART(1, 9600)) # duplicate REPL on UART(1)在UART(1)上重置REPL pyb.wfi() # pause CPU, waiting for interrupt 暂停cpu,等待中断 pyb.freq() # get CPU and bus frequencies 获得CPU频率 pyb.freq(60000000) # set CPU freq to 60MHz 设置CPU频率 pyb.stop() # stop CPU, waiting for external interrupt 停止cpu,等待外部中断
延时和时间
Use the time <utime> module:
import time time.sleep(1) # sleep for 1 second 延时1s time.sleep_ms(500) # sleep for 500 milliseconds 延时500ms time.sleep_us(10) # sleep for 10 microseconds 延时10us start = time.ticks_ms() # get value of millisecond counter 获取毫秒计数器的值 delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference 计算时间差
LED 发光二极管 —-
See pyb.LED <pyb.LED>. :
from pyb import LED led = LED(1) # 红色 led led.toggle() led.on() led.off()
Pins and GPIO
See pyb.Pin <pyb.Pin>. :
from pyb import Pin
p_out = Pin('X1', Pin.OUT_PP)
p_out.high()
p_out.low()
p_in = Pin('X2', Pin.IN, Pin.PULL_UP)
p_in.value() # get value, 0 or 1
舵机控制
See pyb.Servo <pyb.Servo>. :
from pyb import Servo s1 = Servo(1) # servo on position 1 (X1, VIN, GND) 位置1的servo(X1) s1.angle(45) # move to 45 degrees s1.angle(-60, 1500) # move to -60 degrees in 1500ms 在1500ms内移动到-60度 s1.speed(50) # for continuous rotation servos 连续旋转舵机
外部中断
See pyb.ExtInt <pyb.ExtInt>. :
from pyb import Pin, ExtInt
callback = lambda e: print("intr")
ext = ExtInt(Pin('Y1'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
定时器
See pyb.Timer <pyb.Timer>. :
from pyb import Timer tim = Timer(1, freq=1000) tim.counter() # get counter value 获取计时器值 tim.freq(0.5) # 0.5 Hz tim.callback(lambda t: pyb.LED(1).toggle())
PWM脉宽调制
See pyb.Pin <pyb.Pin> and pyb.Timer <pyb.Timer>. :
from pyb import Pin, Timer
p = Pin('X1') # X1 has TIM2, CH1
tim = Timer(2, freq=1000)
ch = tim.channel(1, Timer.PWM, pin=p)
ch.pulse_width_percent(50)
ADC (模数转换)
See pyb.Pin <pyb.Pin> and pyb.ADC <pyb.ADC>. :
from pyb import Pin, ADC
adc = ADC(Pin('X19'))
adc.read() # read value,读取值 0-4095
DAC (数模转换)
See pyb.Pin <pyb.Pin> and pyb.DAC <pyb.DAC>. :
from pyb import Pin, DAC dac = DA
pyboard/quickref.txt · 最后更改: 2019/01/31 18:01 (外部编辑)